Kit integrado para aplicaciones de navegación para drones
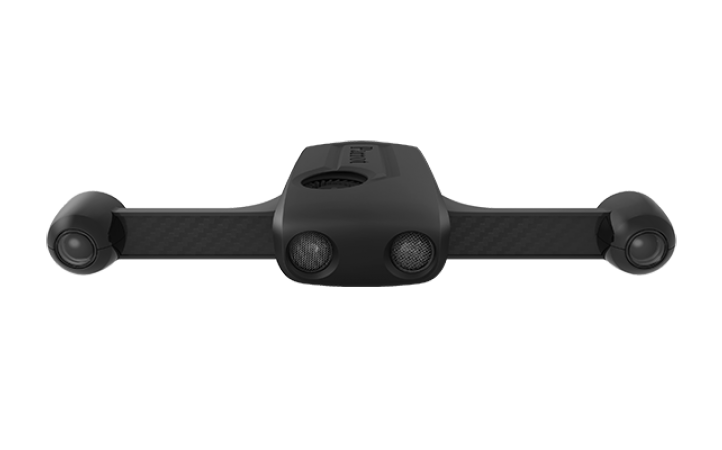
PARROT S.L.A.M.DUNK
EL kit de programación del Parrot S.L.A.M.dunk es una combinación única integrada de sensores electrónicos y algoritmos, diseñado para ayudar a los programadores a acelerar la creación de aplicaciones avanzadas de navegación para los drones y las plataformas robóticas. Parrot S.L.A.M.dunk les da acceso a un conjunto de sensores integrados de forma óptima para proveer datos sin tiempo de latencia, sincronizados a través de API intuitivas.
CÁMARA ESTEREOSCÓPICA
OPTIMIZADA PARA LA VISUALIZACIÓN POR ORDENADOR
Gracias a su cámara estereoscópica de alta resolución y gran angular, Parrot S.L.A.M.dunk genera un mapa de profundidad del entorno que le permite identificar los obstáculos y medir las distancias.

CARTOGRAFÍA Y LOCALIZACIÓN SIMULTÁNEAS
Parrot S.L.A.M.dunk integra un algoritmo avanzado de S.L.A.M. que permite la cartografía en 3D y la localización simultánea en el espacio. Los algoritmos integrados utilizan los datos de los sensores de a bordo para calcular, en tiempo real, la posición en el espacio, sin GPS, y para cartografiar en tres dimensiones el entorno en nubes de puntos.
EVITAMIENTO DE OBSTÁCULOS

El kit Parrot S.L.A.M.dunk es la solución integrada ideal para programadores que crean algoritmos avanzados de evitamiento de obstáculos para drones y robots. En efecto, el kit contiene los elementos necesarios al desarrollo de soluciones de evitamiento: sensores integrados, una carta de profundidad y una cuadricula de ocupación que permite identificar los obstáculos en el espacio.
UN DISEÑO COMPACTO
INTEGRADO PARA DRONES Y ROBOTS

Con solo 140 gr. y un diseño compacto, gracias sus brazos de fibra de carbono, Parrot S.L.A.M.dunk se puede integrar fácilmente en los cuadricópteros, las alas volantes o incluso los robots terrestres.
VÍDEO

EL PAQUETE CONTIENE
- 1 Parrot S.L.A.M.dunk
- 3 Soportes de fijación
- 1 Adaptador CA con 3 adaptadores para diferentes países
- 1 Cable: USB A to micro USB B
- 1 Cable: micro USB A to micro USB B
- 1 Cable de batería XT60
- 1 Manual de instrucciones
EL PRECIO DE COMPRA
- 950,00 EUR
ESPECIFICACIONES TÉCNICAS
CÁMARA ESTÉREO
- 2 cámaras gran angular de alta resolución.
- Modos de vídeo: 1.500 x 1.500 60 FPS – 900 x 700 120 FPS
- Campo de visión de 200°
- Distancia intercámara: 20 cm
SENSORES
- Central inercial
- Ultrasonidos (Alcance: 15 m)
- Barómetro
- Magnetómetro
PROCESADOR DE A BORDO
- Procesador: NVIDIA® Tegra® K1 mobile processor (© 2016 NVIDIA Corporation. Reservados todos los derechos. NVIDIA, el logotipo de NVIDIA y Tegra son marcas registradas de NVIDIA Corporation en los Estados Unidos y otros países)
- RAM: 2 GB DDR3
- Memoria: 16 GB
DIMENSIONES
- 22 x 15 x 3 cm
PESO
- 140 g
INTERFACES
- USB: Micro USB 2.0, USB 3.0
- Vídeo: Salida Micro HDMI (HDMI ® es una marca comercial o registrada de HDMI Licensing LLC en los Estados Unidos y otros países)
- Wifi con opción dongle (ver lista de dongles compatibles)
FUENTE DE ALIMENTACIÓN
- 12V
SISTEMA OPERATIVO
- Ubuntu 14.04 (Ubuntu es una marca de Canonical Ltd, que se utiliza con licencia)
PARROT S.L.A.M. DUNK MANUAL PDF
REGÍSTRATE AHORA EN PARROT
CUENTA PARROT: PARTICULAR | EMPRESA
EFICAZ ORDENADOR DE ABORDO
Parrot S.L.A.M.dunk es un ordenador de abordo completo, diseñado especialmente para los programadores, que utiliza Ubuntu y dispone de un SDK ROS. La solución integra un procesador NVIDIA® Tegra® K1.
El Parrot SLAMdunk funciona con las siguientes tecnologías:
- Ubuntu Trusty (14.04)
- ROS Indigo
Para interactuar con él, necesita una plataforma compatible ROS Indigo. Recomendamos utilizar Ubuntu 14.04, que es la plataforma de referencia con la que se ha probado el producto. Consulte la wiki ROS para las instrucciones de instalación:
También es posible desarrollar en el Parrot SLAMdunk directamente, esto puede ser conveniente para comenzar rápidamente.
Una vez que las herramientas ROS están instaladas, es posible probar la comunicación con el nodo Parrot SLAMdunk.
El primer paso es asegurarse de que el entorno ROS esté configurado:
source /opt/ros/indigo/setup.bashEntonces necesita exportar el ROS_MASTER_URIpara apuntar al maestro ROS.
Un roscorenodo se está ejecutando en el Parrot SLAMdunk, esto está documentado en la Integración de ROS: sección de roscore .
INFORMACIÓN: Al trabajar en el Parrot SLAMdunk (consulte el Modo Escritorio ), no es necesario especificar las variables ROS_MASTER_URI y a ROS_HOSTNAMEcontinuación. Cuando no se especifica, localhostse usa el valor predeterminado .
Cuando se conecta al Parrot SLAMdunk en el puerto OTG Micro-USB 2.0, la ROS_MASTER_URIvariable de entorno se puede establecer en:
export ROS_MASTER_URI=http://192.168.45.1:11311
También necesita exportar ROS_HOSTNAME. Este debería ser un nombre que el Parrot SLAMdunk puede contactar. Si se admite Bonjour / Zeroconf, un valor posible es:
export ROS_HOSTNAME=$(hostname).local












